Use Local Coordiantes doesn't work
 johann.hesters_2e9dd0ece9
Posts: 342
johann.hesters_2e9dd0ece9
Posts: 342
Hello!
I am creating a pistol aim pose in DAZ.
Then I export it and use it in Unity.
In Unity, I have the pistol at local rotation (0,0,0) and at local position (0,0,0).
However, I don't manage to create a good hand pose without a pistol in DAZ.
To solve this problem, I have imported the pistol in DAZ.
Now I'm trying to put the pistol at the same position and with the same rotation as in Unity.
However, I don't know how to do this.
I have parented the pistol to the right hand and set position and rotation to 0, 0,0, however, then the pistol was really far away from the hand.
In this screenshot one can see that I have to position the pistol at (-76.30, 144.53, 2.31) and with a rotation of (61.60, 7.21, -96.09) to make it look "normal".
I have googled on how to fix this problem. I found the suggest to change the Tool Settings coordinate system, but it doesn't work for me. The values don't change for me when I change the coordinate system.
I have used "Use Local Coordinates" as can be seen in this screen, but it doesn't work:
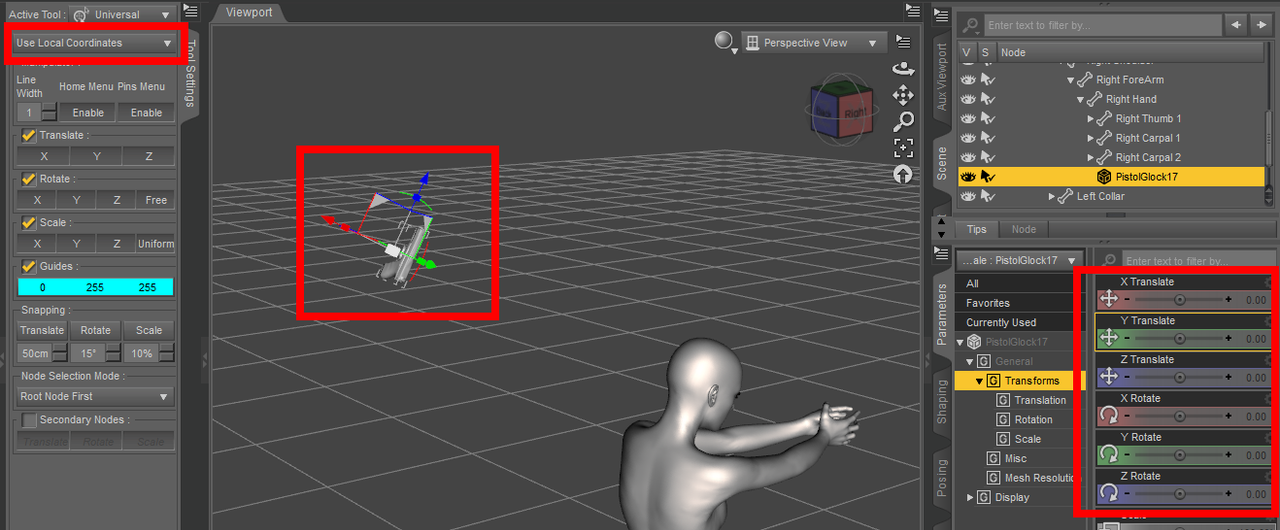
How could I achieve what I want to do?
Thank you!
Daz 3D is part of 
Connect
DAZ Productions, Inc.
7533 S Center View Ct #4664
West Jordan, UT 84084
Licensing Agreement | Terms of Service | Privacy Policy | EULA
© 2024 Daz Productions Inc. All Rights Reserved.
Comments
The values of the transforms in Studio are for the center point of the prop, which is not necessarily on the prop itself. The rigging might need to be adjusted to bring the center point to a suitable position in DAZ Studio. Select the Joint Editor tool, and go to the Tool Settings page. Since this is a prop, there is only one parameter that can be adjusted, the Center/End points. Select your prop (make sure it is not parented to anything) and look for the green (Center Point) and red (End Point) co-ordinate axes. They could be at world (0,0,0) but the prop offset at some other position. You can use the arrows to drag the Center and End point axes closer to the prop, drag the position sliders, or type in values for the x, y, z positions directly. Move the prop to the zero position. If the prop is rotated with respect to the world axes, adjust the orientation with the X, Y, Z rotation sliders. You'll have to eyeball the adjustments, there is no way to automatically align it to the geometry. Use the Center Axes in the viewport as a visual aid.
Now, when you parent the prop to the hand, it should end up close to the hand, not floating off in space. You will probably still need to adjust the position a little, depending on how the Center point of the prop aligns with the Center point of the hand. Make sure "Parent in Place" is not selected.
The coordinate system used for the Universal tool (and Translate, Rotate, Scale) is for manipulating the prop or figure using one of the various modes. For example, I find it more convenient to adjust props like weapons with the Object coordinates (as long as they are aligned with the prop's geometry) after they are parented and posed in the hand, since the pose will not likely line up with world coordinates.
@NorthOf45
Thank you, a quick question in return: When I import the pistol into DAZ, it looks just like this. Looks perfectly fine, doesn't it?
So I don't know if your explanations are really suited for my situation:
I would like to explain again that I need to see the rotation of the right hand.
In Unity, I would simply parent the pistol to the right hand and set local position to 0, 0, 0 with a rotation of 0, 0, 0.
This way I would immediately see which way the right hand "aims".
But I don't see a way to do the same in DAZ.
Sorry if I over-explain...
You need to move the pistol to where it should be, inside the figure's hand, and parent it, regardless of what its coordinates are.
That's just how Daz Studio works.
I checked a few of my weapons products, and all the wearable guns are offset from 0,0,0.
Ok... when I leave the pistol exactely where it is and the choose "Set Parent" and use the rHand as the parent, then at least I get the correct rotation.
Okay, that looks good. But how did the pistol get up and behind the figure's head in the first picture? If you parent the pistol to the hand, it should move to the hand, aligning the Center points (pistol and hand bone). Might not be pointing in the right direction, though.
Anyway, to answer the question, I don't think there is a way to display the pistol's position relative to the hand since it is not part of the figure's skeleton. The Transforms shown are the position relative to its loaded zero position, after parenting and adjusting, but don't change as the figure is posed. The hand's transforms will be its position relative to its parent bone (forearm). The coordinate system used in the Parameters tab can't be changed (probably too confusing, I know I am getting dizzy playing with the different modes.)
The pistol got behind the figures head after I parented it to the rHand and then set the pistol's position to (0,0,0).
I was hoping this would place it at local position (0,0,0).
Obviously it doesn't. But that's not so much of a problem. Having the rotation ok is sufficient now for me to test the pistol aiming.
Hmmm, not sure what I did to have the pistol rotated correctly.
Now when I try the same, it just doesn't work anymore.
If you are using the Universal Tool in the viewport, now would a good time to change to Local or Object Coordinates. The axes should be aligned with the geometry, and can be rotated in any order. If using the Transform sliders to set an orientation, they use world coordinates, you must do them in reverse order of that shown in the Joint Editor tool (i.e., if it is YXZ, set Z first, then X, then Y, otherwise they get all cross-coupled).